
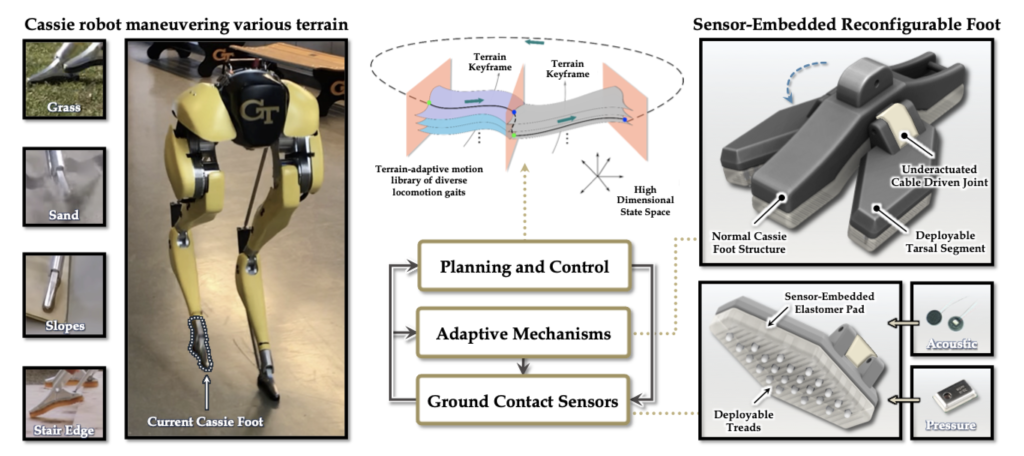
Locomotion over cluttered outdoor environments requires the contact foot to be aware of terrain geometries, stiffness, and granular media properties. Although current internal and external mechanical and visual sensors have enabled high-performance state estimation for legged locomotion, rich ground contact sensing capability is still a bottleneck to improved control in austere conditions. From the robot planning and control perspective, numerous trajectory optimization methods are built on a conservative assumption of point contact dynamics with a rigid ground surface. This assumption largely overlooks the underlying patch contact dynamics and contact surface deformation and elasticity. A fundamental reason stems from limited computational resources in solving the aforementioned optimization problems. With the significant increase of high-performance computing power and the advancement of distributed algorithms in recent years, parallelizable algorithm implementations have substantially advanced the computation capability and enabled us to solve considerably large- scale optimization in real-time. However, designing high-fidelity contact sensing mechanisms for legged robots is yet underexploited, let alone how to integrate rich contact sensing information into the planning and control algorithms. These key factors motivate us to propose novel robotic mechanisms that have the potential to facilitate terrain-adaptive planning and control methods.
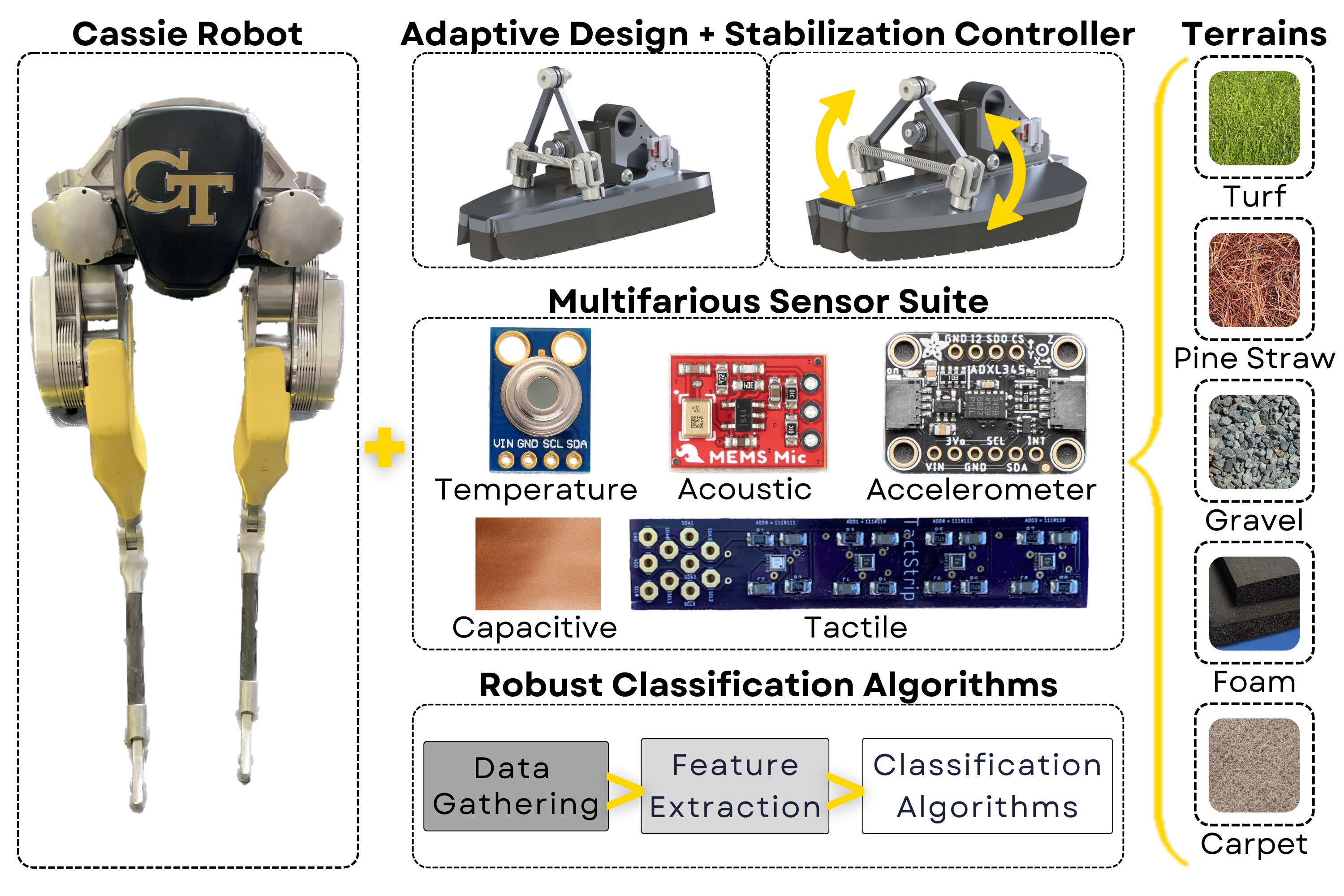
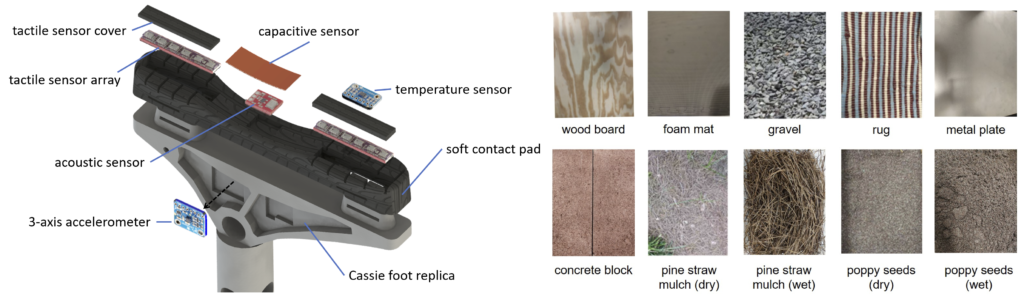
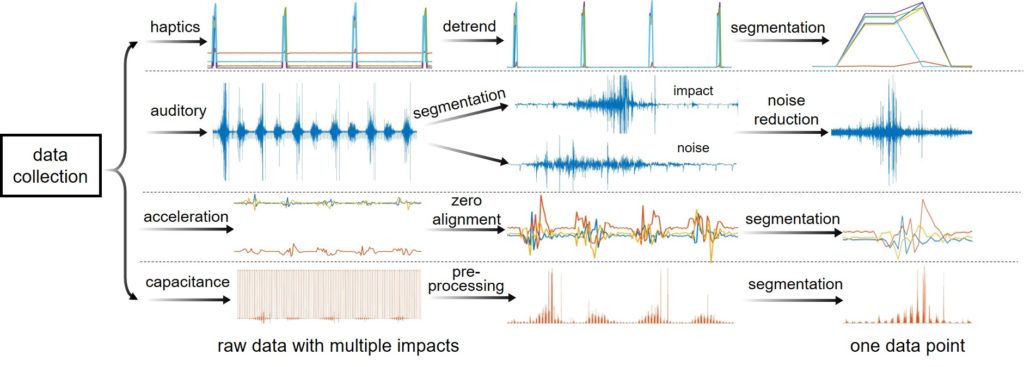
In this project, we design a new soft contact pad integrated with a variety of embedded sensors, including tactile, acoustic, capacitive, temperature sensors, and accelerometers. In addition, we devise a terrain classification algorithm based on features extracted from those sensors and various real-world terrains. The classifier uses these features as input and classifies various terrains via Random Forests and a memory function. So far, our cross-validation tests demonstrate that the proposed classification algorithm achieves an accuracy of about 96.5%, manifesting the applicability of this foot sensing device to bipedal locomotion over diverse terrains. We are pushing forward more progress on a fully integrated sensor pad and experimental evaluations on our Cassie bipedal robot.
Research challenge: what is the optimal mechanism for the biped foot sensor pad to be robust to sensor failures and adaptive to terrain variations? What is the minimal set of sensor information needed to provide sufficient terrain knowledge for a legged robot to maneuver over austere terrain? How to balance between accurate contact sensing model and “model-free” approach (e.g., compliant foot mechanism inherently robust to terrain variations)? How to symbolically represent the terrain information and encode them into high-level locomotion planning and control?
This project is a collaboration with Dr. Frank L Hammond‘s group.
Representative publications:
X. Guo, B. Blaise, J. Molnar, J. Coholich, S. Padte, Y. Zhao*, and F. Hammond III*. Soft Foot Sensor Design and Terrain Classification for Dynamic Legged Locomotion, (*co-corresponding authors), IEEE International Conference on Soft Robotics (RoboSoft), 2020. [pdf] [Video]