
For students that want to join our VIP teams please check out our available projects for current VIP projects here:
*updated for Spring 2026
You are encouraged to reach out the mentor BEFORE you apply. Self motivated students can also participate research outside VIP programs.
Quadrupedal Navigation
Mentor: Max Asselmeier (mass@gatech.edu)
Project description: The quadrupedal navigation (QuadNav) project will continue our ongoing efforts to establish a pipeline for online, real-time perception-informed navigation using the Robot Operating System (ROS). This navigation pipeline will include global and local planning, a simultaneous localization and mapping (SLAM) process, and other quadruped-specific modules including terrain traversability and steppability estimation.
Humanoid Loco-manipulation Skill Learning
Mentor name: Zhaoyuan Gu (zgu78@gatech.edu)
Project Description: In this project, we will explore the state-of-the-art machine-learning approaches that enable our humanoid robot to perform a series of locomotion and manipulation tasks, such as pushing through a spring-loaded door. Instead of traditional reinforcement learning, we will explore the diffusion model, an imitation learning technique that has been shown to achieve versatile skills.
Digit Humanoid Robot Loco-Manipulation and Its Integration with a Third Arm
Mentor: Fukang Liu (fukangliu@gatech.edu), Paul Barsa (pbarsa3@gatech.edu)
Project Description: This project explores the capabilities of humanoid robots enhanced with supernumerary limbs. Potential tasks include opening doors while carrying a box, interacting with overhead areas, and using the extra arm as a contact point for extreme movements. The project will leverage diverse datasets (e.g., from model-based methods, model-free methods, motion capture, and video) to develop and refine the locomotion and manipulation skills of the Digit humanoid robot and its third arm. Additionally, the project aims to attach grippers to all three arms and investigate sequential collaborative tri-arm loco-manipulation tasks. Simulation will be conducted in IsaacLab, followed by testing on hardware. The scope includes both software development (policy training and deployment) and hardware design (third-arm prototyping and control).
Reinforcement Learning for Humanoid Robots
Mentor: Feiyang Wu (feiyangwu@gatech.edu)
Project Description: This project will train and deploy Reinforcement Learning agents on humanoid robots. We will develop our own training algorithm and use IsaacLab to train RL agents. We will conduct extensive hardware experiments on our G1 robot for locomotion tasks.
Humanoid VLA Planning & Control
Mentor: Feiyang Wu (feiyangwu@gatech.edu)
Project Description:
The goal of this research is to fine-tune VLA models for humanoid control, including but not limited to upper body manipulation, and whole body loco-manipulation.
Humanoid navigation through embodied AI and learning, grounding VLN outputs in robot capabilities and physical constraints
Mentor: Ziwon Yoon (zyoon6@gatech.edu)
Project Description: This project focuses on humanoid navigation in complex real-world environments through embodied AI and learning. I develop autonomy frameworks that integrate perception, navigation, and locomotion, enabling humanoid robots to reason about terrain and interact with their surroundings in a physically grounded way. In particular, I study how high-level semantic reasoning from VLM/VLN/VLA models can be grounded in a robot’s embodied constraints and capabilities, such as stability limits, locomotion feasibility, and contact dynamics. By linking vision-language reasoning with physically feasible motion, my goal is to enable humanoid robots to navigate and operate safely and robustly in unstructured environments such as rough terrain and cluttered outdoor spaces.
Whole-Body Control for Human-Humanoid Collaborative Transport Task
Mentor: Jaehwi Jang (jjang318@gatech.edu)
Project Description:
The goal of this research is the development of a whole-body control method for humanoid robots for collaborative transportation tasks with humans. Most recent developments in real-world humanoid control have focused on single-agent motion in open environments. Our work extends these capabilities to support dynamic, responsive teamwork in complex, interactive environments.
Our approach combines imitation learning with social skill learning to enable robots to effectively coordinate with humans. We are developing the Sim2Real framework for transfer to a real-world collaborative task.
Haptic glove & human sensing
Mentor: Feiyang Wu (feiyangwu@gatech.edu)
Project Description:
The goal of this research is to collect human data with various tools (including but not limited to: AR/VR, haptic glove, motion capture) in order to analyze human task solving strategies.
VIP Undergraduate Research and Education
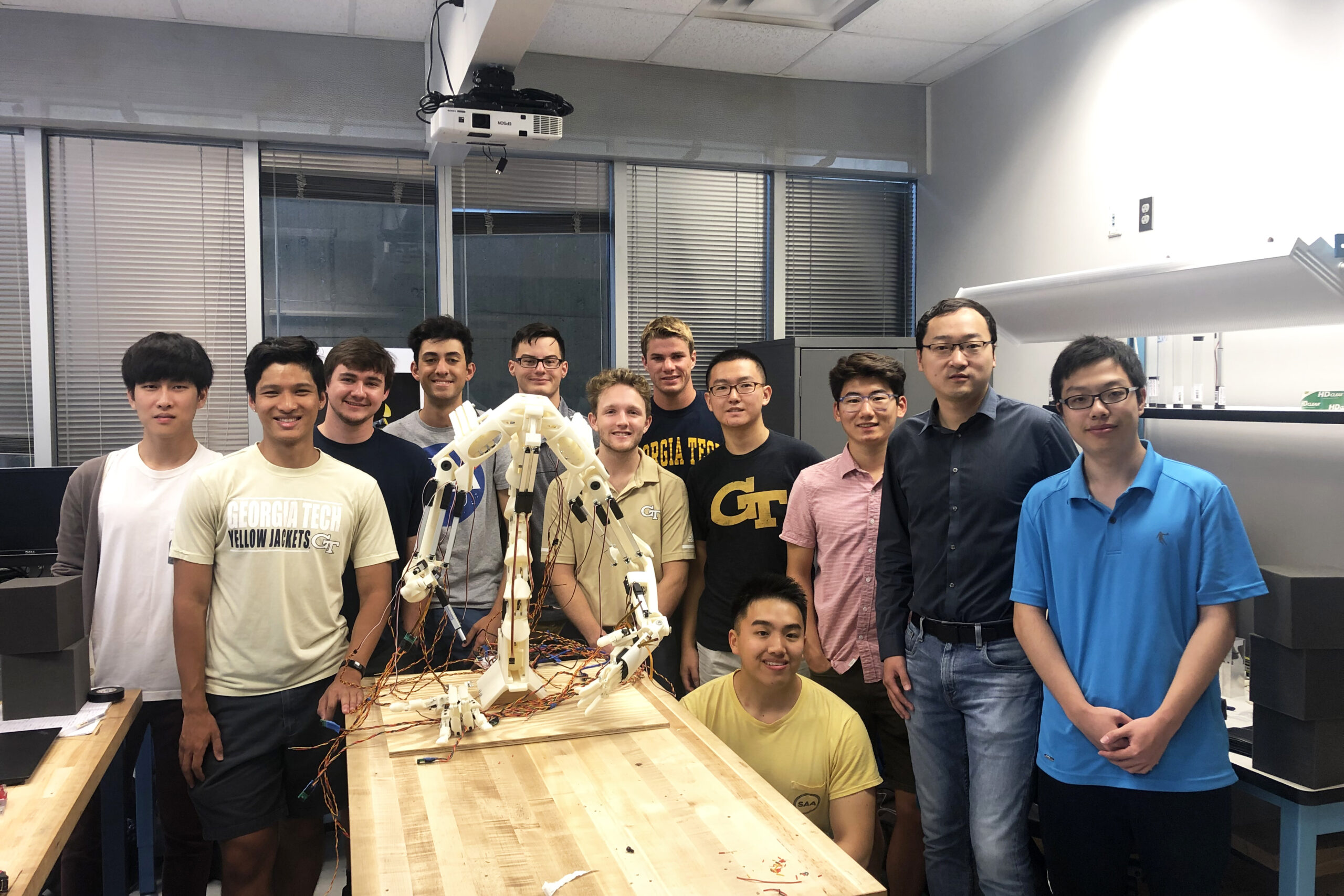
Our LIDAR group is leading a multi-disciplinary Vertically Integrated Program (VIP) team — Agile Locomotion & Manipulation (co-advised by Profs. Ye Zhao and Seth Hutchinson) — that offers a transformative mechanism to engineering and science education by engaging undergraduate students in a cross-college, multi-semester, and large-scale project team. Currently, the team is composed of 80 undergraduate students from diverse engineering, science, and computing disciplines. Over the past few years, the VIP team has been an indispensable and integrated component of our research team and actively contributed to various aspects of our experiment-focused research projects, including the design of a biomimetic upper-body manipulator, bipedal robot Cassie foot sensor pad design and integration, quadrupedal SLAM perception, Cassie and Digit locomotion control and experimentation, Kuka manipulation perception, and Gelsight tactile sensing. Our VIP research is supported by the NSF Grant # 1924978, #2144309, and Georgia Tech Undergraduate Research Opportunities Program.

Team Achievements
2024 Second place in the ME Capstone Competition (Robotic Achilles Foot Team)
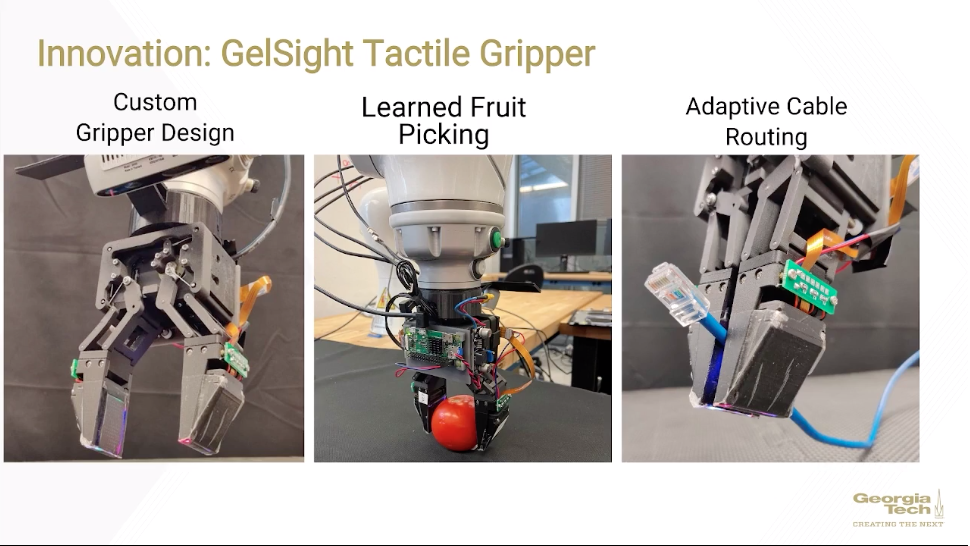
2022 First place in the Robotics Track of the GaTech VIP Innovation Competition (Gelsight Manipulation Project) click the image below for the competition video
2022 Georgia Tech Vertically Integrated Program (VIP) Outstanding Mentor Award and school-level winner of Georgia Tech CTL TA Award (Nathan Boyd)

2022 Most Outstanding Exhibit Award in STEM at the Yale Science and Engineering Association (YSEA) Science Fair (Silver awardee: E. Andrew Botchwey and Gold awardee: Noah Morales, students in Georgia Tech ENGAGES program)
2021 First place in the Hardware, Devices & Robotics Track of the GaTech VIP Innovation Competition (Athena Biomimetic Robot Avatar Project)
2020 IEEE/ASME International Conference on Advanced Intelligent Mechatronics Best Late Breaking Results Poster Award

Georgia Tech President’s Undergraduate Research Awards
2023 Fall awarded PURA project: Effectiveness of Bimanual Handling of Deformable Objects with Hybrid Adhesion Rohan Punamiya, Mechanical Engineering, 2022 January – present, Graduate mentor: Chaitanya Mehta
2023 Spring awarded PURA project: Signal Temporal Logic on Bipedal Locomotion
Sixing Chen, Electrical and Computer Engineering, 2022 September – present, Graduate mentor: Zhaoyuan Gu
2022 Fall PURA Travel award: Leveraging Heterogeneous Capabilities in Multi-Agent Systems for Environmental Conflict Resolution presented at 2022 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR)
James Ni, Mechanical Engineering, 2020 January – present, Graduate mentor: Zhaoyuan Gu and Yunhai Han (co-mentored by Prof. Sam Coogan)
2022 Fall awarded PURA project: Imitation Learning for Loco-manipulation Tasks
Kasia Y. Fadeeva, Mechanical Engineering, 2022 May – present, Graduate mentor: Zhaoyuan Gu
2022 Fall awarded PURA project: A Human-Collaborative Robot Team With Heterogeneous Capabilities and Safety Guarantee Through Time-Varying Control Barrier Functions
James Ni, Mechanical Engineering, 2020 January – present, Graduate mentor: Zhaoyuan Gu and Yunhai Han (co-mentored by Prof. Sam Coogan)
2022 Spring awarded PURA project: Underactuated Motion Planning and Control for Bipedal Robot Running and Jumping Wei Pao (William), Mechanical Engineering, 2021 September – present, Graduate mentor: Zhaoyuan Gu
2022 Spring awarded PURA project: Routing Cables in 3D Space Using Soft Tactile Sensors Achintya Mohan, Computer Engineering, 2021 January – present, Graduate mentor: Nathan Boyd
2022 Spring awarded PURA project: Development of a Human-Robot Collaboration Team with Safety Guarantee by Control Barrier Functions James Ni, Mechanical Engineering, 2020 January – present, Graduate mentor: Yunhai Han
2021 Fall awarded PURA project: Improving Trajectory Optimization Feasibility for Problems with Intermittent Contact Using Reinforcement Learning Abhinav Kumar, Computer Science, 2021 January – 2021 December, Graduate mentor: Luke Drnach
2021 Fall awarded PURA project: Design for Modular SLAMBox and Robust Real-time SLAM Pipeline for Legged Robots Vishwa Ramkumar, Mechanical Engineering, 2020 January – present, Graduate mentor: Dong Jae (Danny) Lee
2021 Summer awarded PURA project: Robotic Arm Perception and Manipulation with Robust Multi-Level Optimization Nima Jadali, Computer Science, 2021 January – present, Graduate mentor: Zhigen Zhao
2021 Spring awarded PURA project: Computer-Aided Manufacturing and Dynamic Analysis of a Six Degree of Freedom Stewart Platform Manipulator Dongheon Han, Mechanical Engineering, 2019 Sep. – 2021 May, Graduate mentor: Dong Jae (Danny) Lee
2020 Summer awarded PURA project: Design and Control of a Self-Balancing Unmanned Bicycle James Ni, Mechanical Engineering, 2020 January – present
2020 Fall awarded PURA project: Athena Humanoid Upper Body Robot – Head Design, Eye Subsystem Lee Jun (Marina) Ahn, Mechanical Engineering, 2020, Graduate mentor: Dong Jae (Danny) Lee
2020 Fall awarded PURA project: Visual Servoing with Obstacle Avoidance in Robotic Arms Ziwei (Rebecca) Zheng, Mechanical Engineering, 2019 January – 2020 May, Graduate mentor: Zhigen Zhao
2020 Spring awarded PURA project: Robust Perception for Dynamic Grasping Skills in Clutter Tanner Beard, Mechanical Engineering, 2019 July – 2020 May, Graduate mentor: Zhigen Zhao
2020 Spring awarded PURA project: Model and Control of Robust Contact-Rich Manipulation Skills. Ziyang (John) Zhang, Mechanical Engineering, 2019 August – 2021 December, Graduate mentor: Zhigen Zhao
2020 Spring awarded PURA project: Athena Humanoid Upper Body Robot Design and Kinematics-based Motion Planning Zhengyang (Kris) Weng, Mechanical Engineering, 2021, Graduate mentor: Jeremiah Coholich
Georgia Tech SURE Program Students
Chirayu Mihir Salgarkar (Mercer University, Summer 2021, co-advised with Prof. Samuel Coogan, Georgia Tech SURE Robotics Program)
Harjinder Singh Pawar (Biomedical Science, The City College of New York, Summer 2022, co-advised with Prof. Anqi Wu, Georgia Tech SURE Program, Center for Engineering Education and Diversity)
Arda Yigitkanli (Biomedical Engineering, Georgia Tech, Summer 2023, Georgia Tech SURE Program, Center for Engineering Education and Diversity)