
Overview:
Navigating dynamic, human-crowded environments is challenging for bipedal robots due to uncertain pedestrian dynamics and social behavior considerations. This research introduces a novel framework that integrates prediction and motion planning using the Social Zonotope Network (SZN), enabling socially acceptable and collision-free bipedal robot navigation.
Key Research Goals:
1. Bidirectional Social Interaction: Predict and adapt to human pedestrian movements while considering mutual influence between the robot and its environment.
2. Socially Aware Path Planning: Create motion plans that respect personal space, maintain safety, and follow socially acceptable norms.
3. Locomotion Feasibility: Ensure that generated paths comply with the robot’s physical capabilities, including stability and dynamic constraints.
Methodology: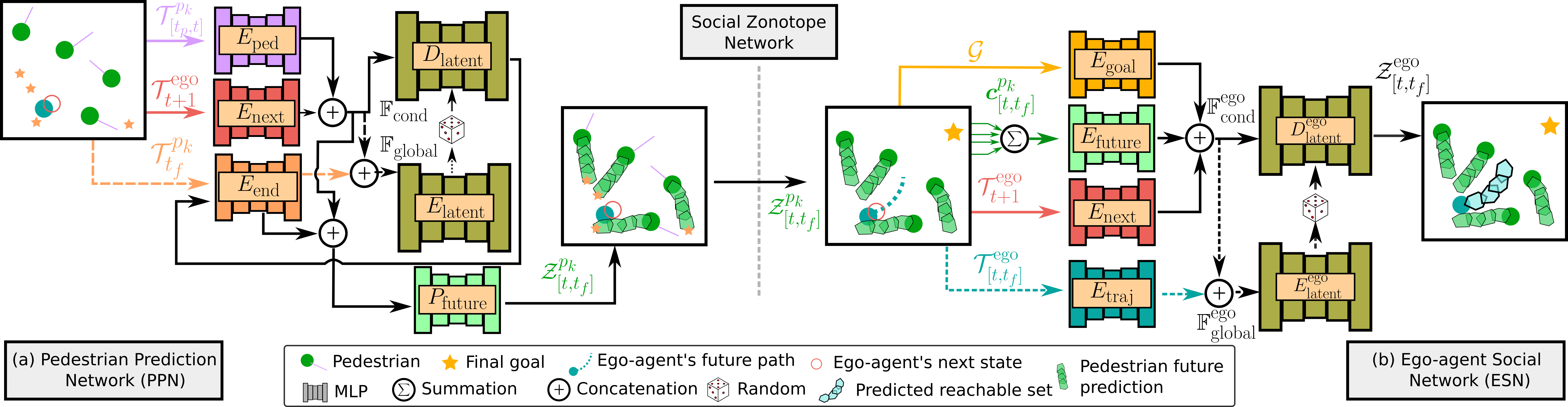
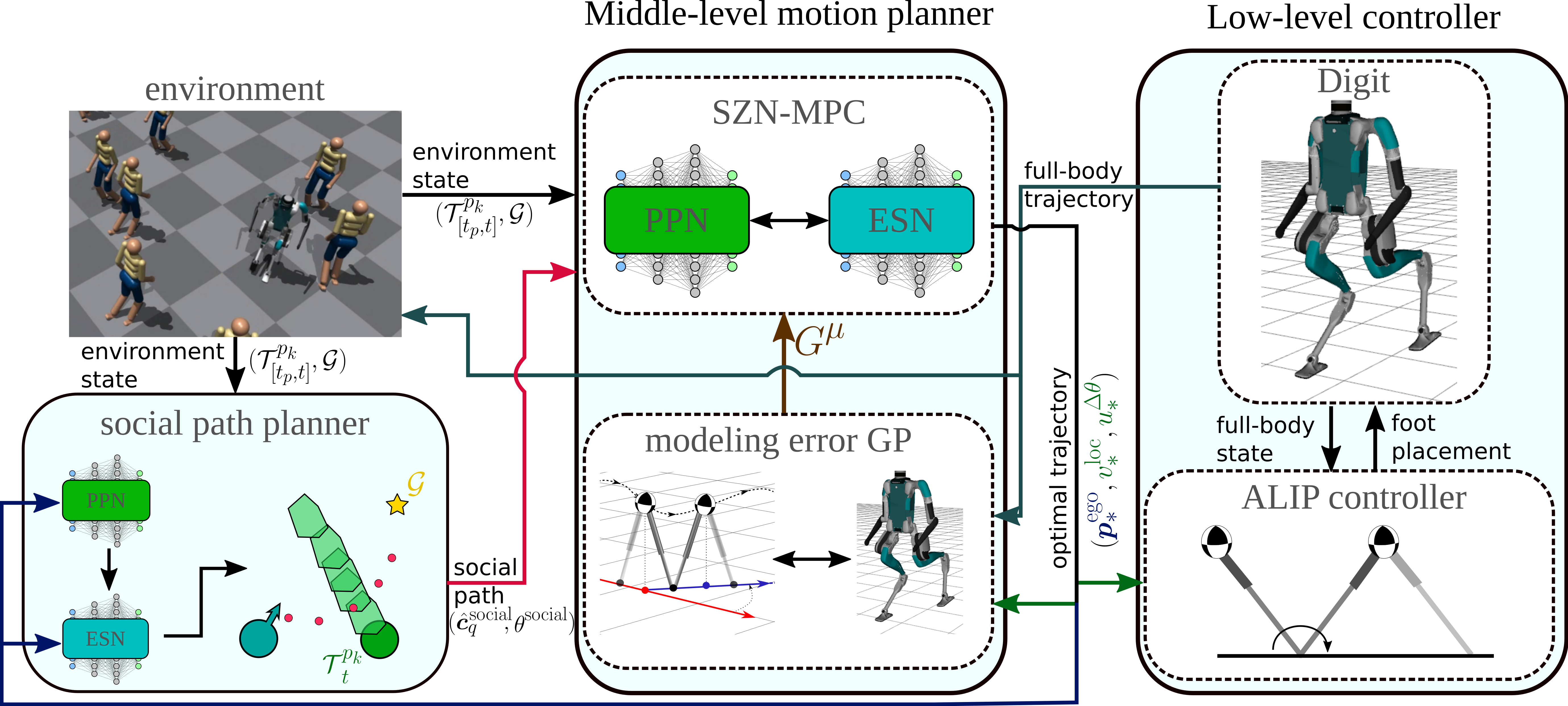
1. Social Zonotope Network (SZN):
– Composed of two sub-networks:
– Pedestrian Prediction Network (PPN): Predicts future pedestrian trajectories using zonotopes for efficient collision checking.
– Ego-agent Social Network (ESN): Plans a socially acceptable robot path by learning from real pedestrian data.
– Utilizes Conditional Variational Autoencoders (CVAE) for robust trajectory generation.
2. Model Predictive Control (MPC):
– Integrated with SZN for dynamic path optimization.
– Constraints include collision avoidance and locomotion feasibility.
– Social acceptability is enforced through a custom cost function minimizing deviation from learned social paths.
3. Zonotope Refinements:
– Personal Space Modulation: Adjusts the robot’s motion plan to avoid violating human personal space.
– Modeling Error Compensation: Applies Gaussian Process-based corrections for reduced-order model to full-order model discrepancies
Experimental Validation:
– Simulations: Conducted extensive simulations in crowded environments, demonstrating reduced path deviations, socially compliant behavior, and optimal motion planning.
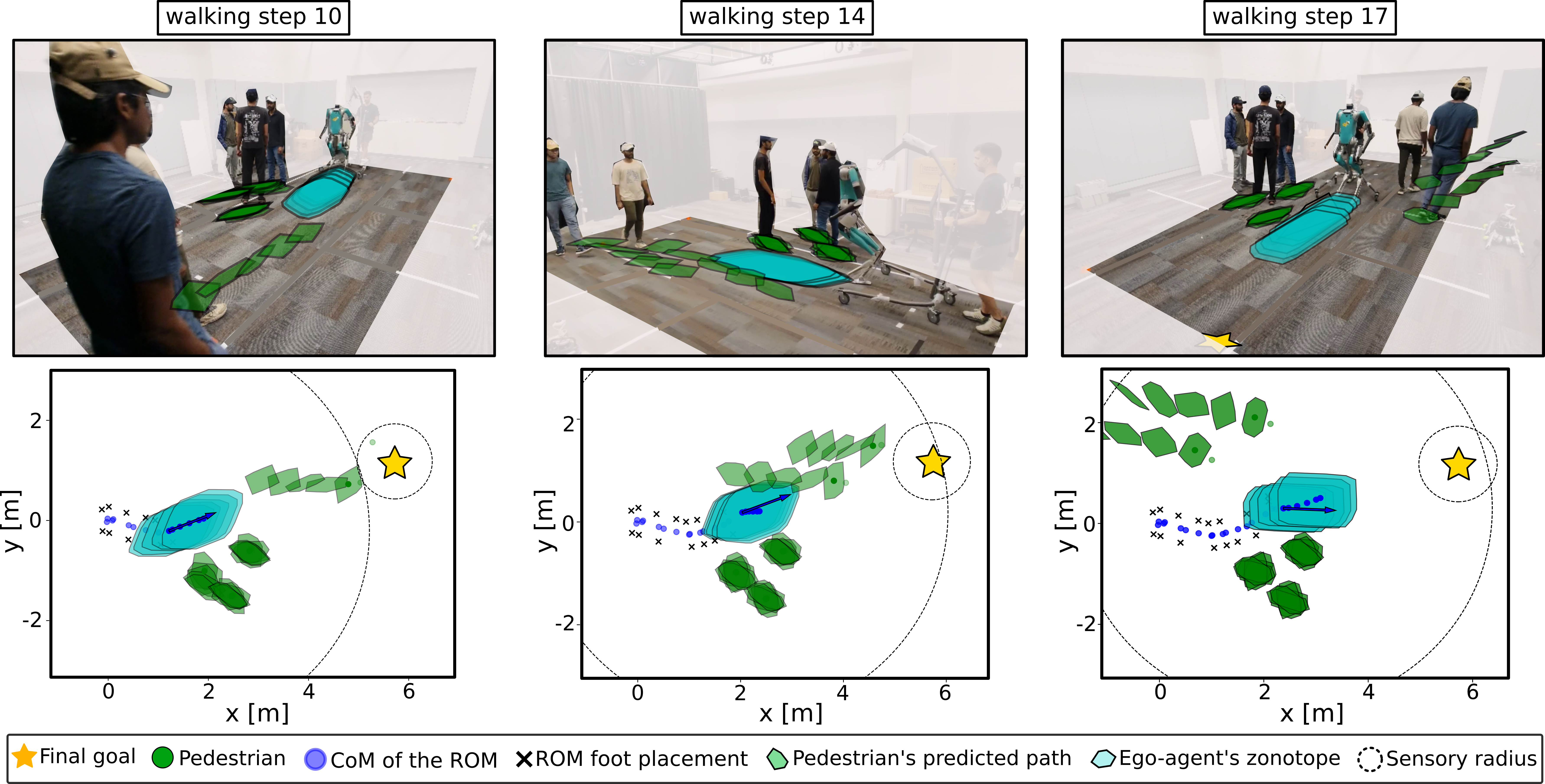
– Hardware Experiments: Implemented on a Digit robot navigating among pedestrians, showcasing safe and adaptive behavior in real-world scenarios.
Key Findings:
– Social Acceptability: The proposed method generates human-like robot paths with predictable behavior for the robot which is socially preferable.
– Safety and Efficiency: Ensures dynamic balance, collision-free navigation, and reduced computational overhead through zonotope-based modeling.
– Real-Time Applicability: Achieves real-time performance suitable for real-world applications like airport navigation, hospital logistics, and public service robots.
Representative publications:
Abdulaziz Shamsah, Krishanu Agarwal, Nigam Katta, Abirath Raju, Shreyas Kousik*, and Ye Zhao*. Socially Acceptable Bipedal Robot Navigation via Social Zonotope Network Model Predictive Control. (*co-senior authorships), IEEE Transactions on Automation Science and Engineering, 2024. DOI: 10.1109/TASE.2024.3519012 [pdf] [video] [website]
Abdulaziz Shamsah, Krishanu Agarwal, Shreyas Kousik*, and Ye Zhao*. Real-time Model Predictive Control with Zonotope-Based Neural Networks for Bipedal Social Navigation. (*co-senior authorships), IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024