
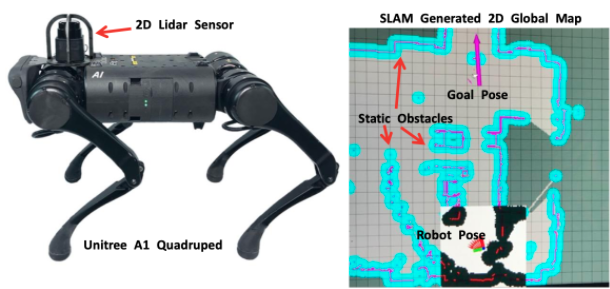
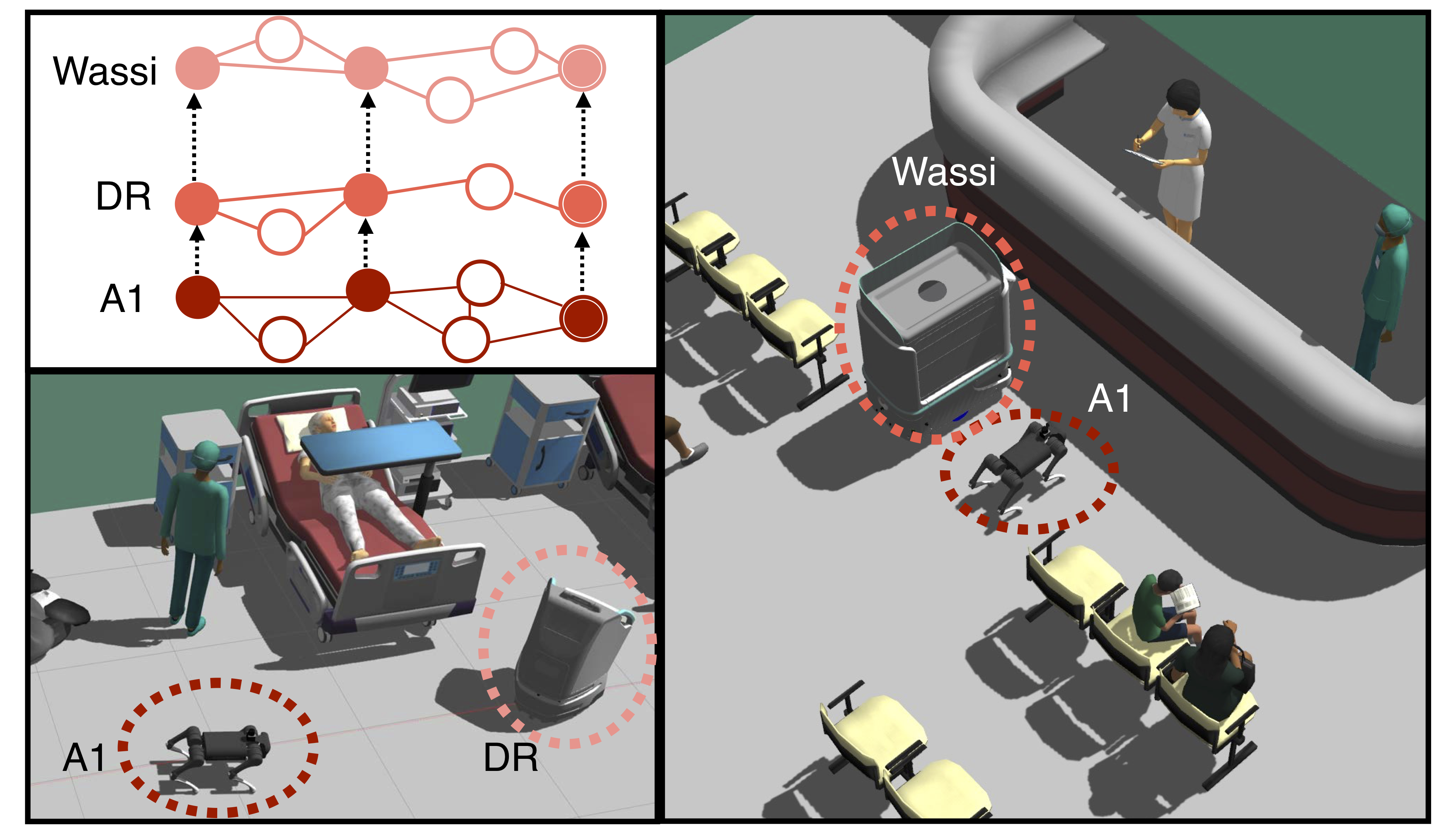
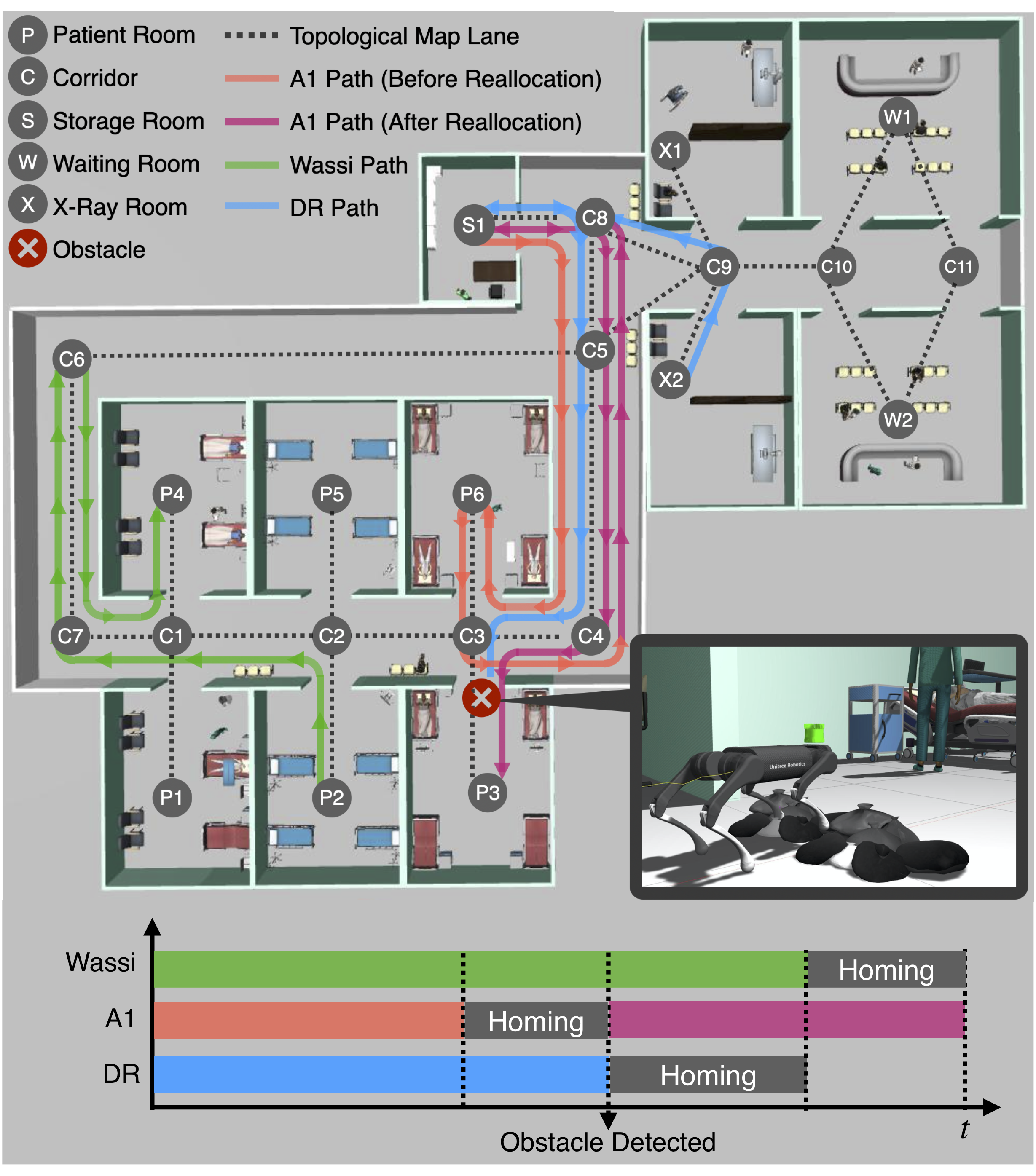
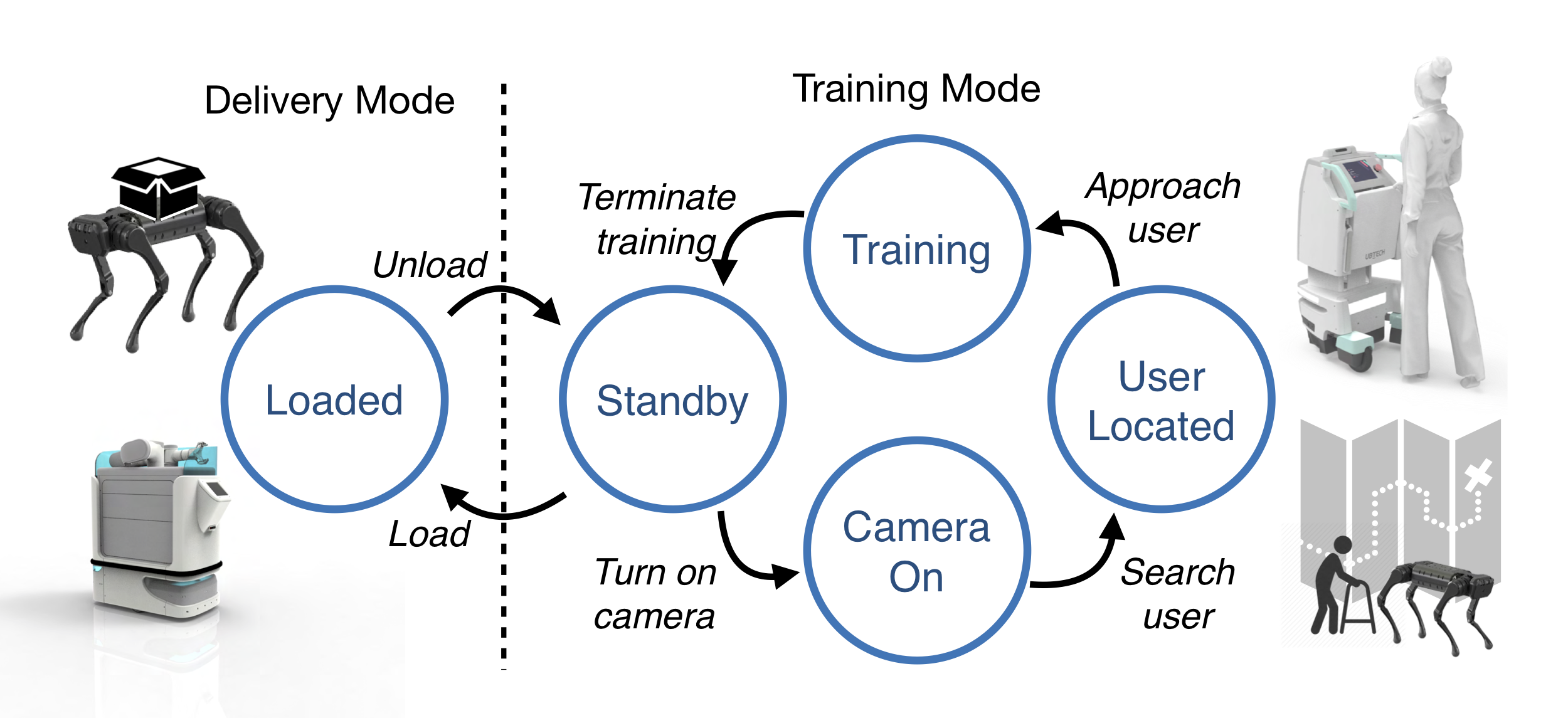
The objective of this research project is to design closed-loop perception, navigation, task and motion planners for dynamic-legged robots to autonomously navigate complex indoor environments while accomplishing specific tasks such as office disinfection. In the long-term run, a multi-agent cooperation scenario involving both quadrupedal and bipedal robots will be designed in both simulation and the mock indoor facility to validate the feasibility for real-life application scenarios. A team of legged robots will be able to autonomously navigate through various types of indoor terrain to disinfect appropriate objects while keeping humans in the loop through front-end user interfaces. [More details upcoming!]

———————————————————————————————————————-
Representative publications:
Ziyi Zhou, Dong Jae Lee, Yuki Yoshinaga, Dejun Guo, and Ye Zhao. Reactive Task Allocation and Planning of A Heterogeneous Multi-Robot System, Submitted, 2021.