Robust and Reactive Decision-making and AI Planning of Collaborative and Agile Robots in Complex Environments
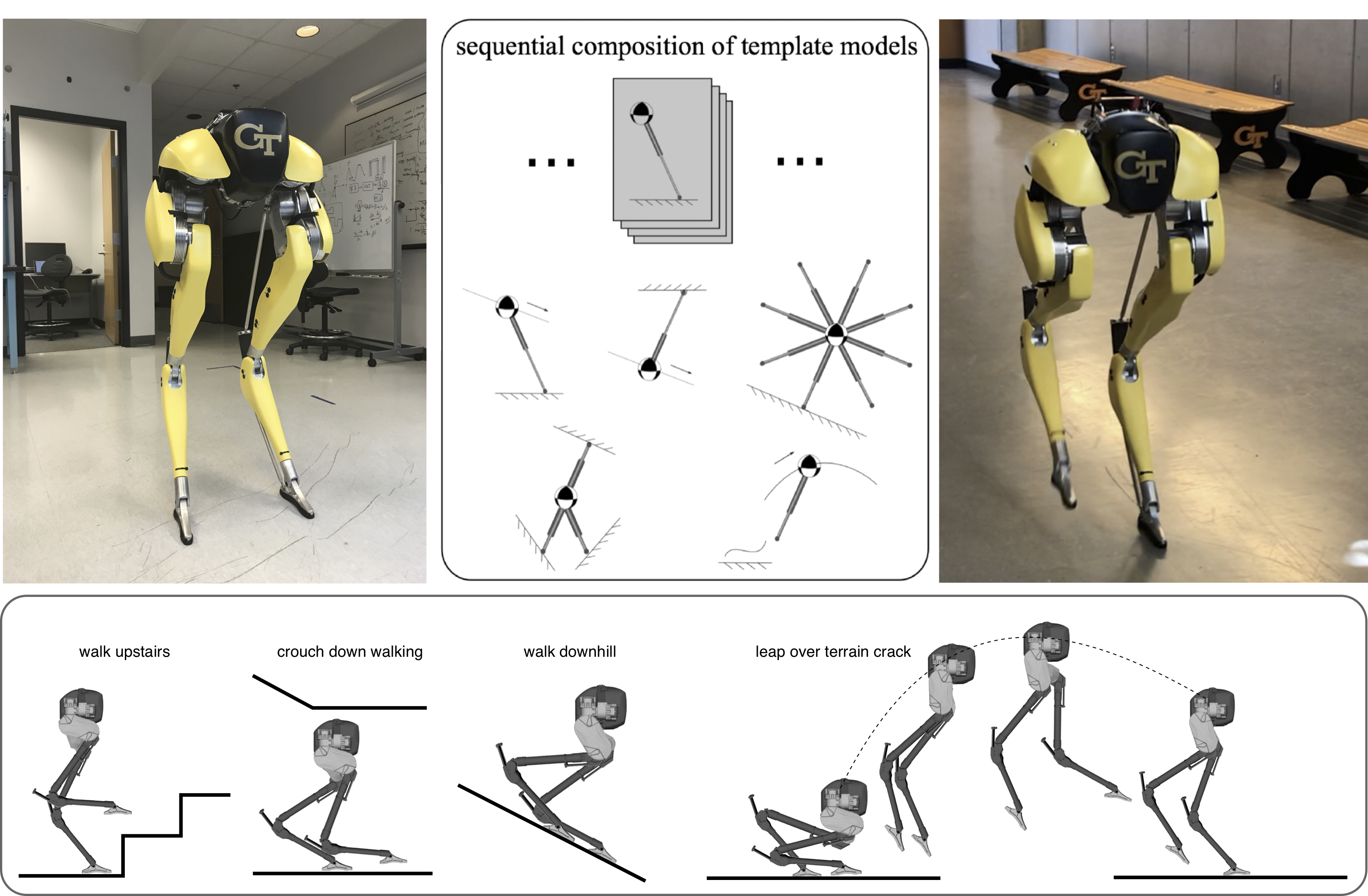
This project will focus on formal methods and decision-making algorithms of dynamic terrestrial locomotion and aerial manipulation in complex and human-surrounded environments. We aim at scalable planning and decision algorithms enabling heterogeneous robot teammates to dynamically interact with unstructured environments and collaborate with humans. In particular, we are interested in robust task and motion planning approaches that (i) abstract and unify diverse, complex low-level robot dynamics generally possessing under-actuated, hybrid, and nonlinear features; (ii) computationally efficient, safe and reactive decision-making algorithms explicitly taking into account dynamic environmental events and human motions. One of our long-term goals is to achieve a hierarchical and scalable planning framework with the following objectives: (i) robust, non-periodic motion planners and control barrier certificates for versatile terrestrial and aerial maneuvering; (ii) game-based reactive task planner in response to diverse and possibly adversarial environmental events; (iii) novel multi-agent decision-making approaches that decompose the entire robot team into multiple sub-teams with receding horizon approaches. We will adopt algorithmic methods at the interaction of formal methods, multi-agent systems, robust control, and machine learning. Formal guarantees such as robustness, safety, and runtime performance will be targeted. The experimental performance will be evaluated on the Buzzy Cassie robot in the lab. Please stay tuned for more information.
Reactive Task and Motion Planning for Robust Whole-Body Locomotion in Constrained Environments
Contact-based decision and planning methods are increasingly being sought for task execution in humanoid robots. However, formal methods from the verification and synthesis communities have not been yet incorporated into the motion planning sequence for complex mobility behaviors in humanoid robots.
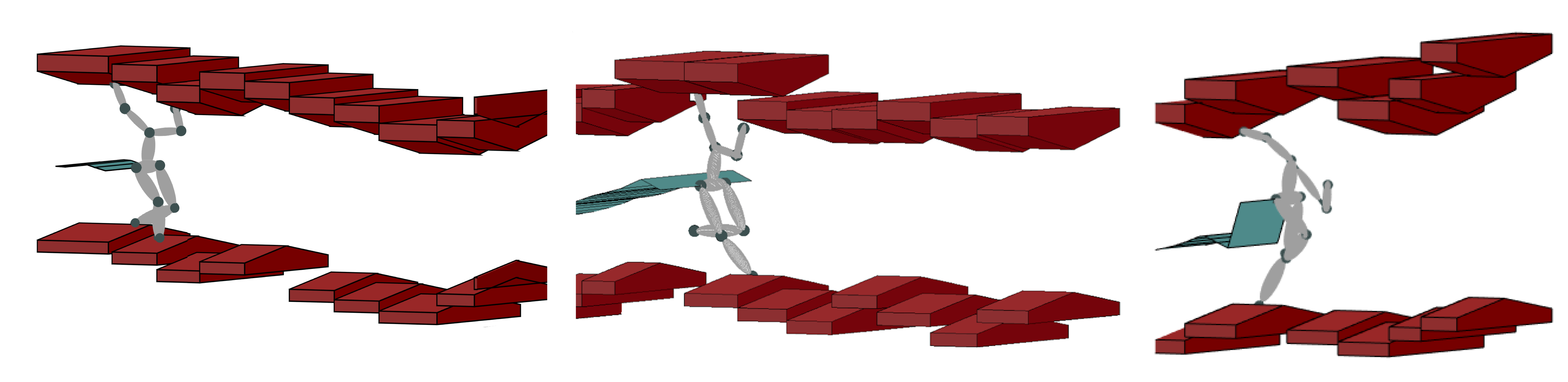
This project takes a step toward formally synthesizing high-level reactive planners for unified legged and armed locomotion in constrained environments. We formulate a two-player temporal logic game between the contact planner and its possibly adversarial environment. The resulting discrete planner satisfies the given task specifications expressed in a fragment of temporal logic. The resulting commands are executed by a low-level 3D phase-space planner algorithm. We devise various low-level locomotion modes based on centroidal momentum dynamics. Provable correctness of the low-level execution of the synthesized discrete planner is guaranteed through the so-called simulation relations. Simulations of dynamic locomotion in constrained environments support the effectiveness of the hierarchical planner protocol.