
Contact-based decision and planning methods are increasingly being sought for task execution in humanoid robots. However, formal methods from the verification and synthesis communities have not been yet incorporated into the motion planning sequence for complex mobility behaviors in humanoid robots.
This project takes a step toward formally synthesizing high-level reactive planners for unified legged and armed locomotion in constrained environments. We formulate a two-player temporal logic game between the contact planner and its possibly adversarial environment. The resulting discrete planner satisfies the given task specifications expressed in a fragment of temporal logic. The resulting commands are executed by a low-level 3D phase-space planner algorithm. We devise various low-level locomotion modes based on centroidal momentum dynamics. Provable correctness of the low-level execution of the synthesized discrete planner is guaranteed through the so-called simulation relations. Simulations of dynamic locomotion in constrained environments support the effectiveness of the hierarchical planner protocol.
Research Challenge: As observed in agile human and animal locomotion in nature, how to decompose these complex behaviors into simple modes/models and sequentially compose them to achieve agile and robust locomotion, in particular in response to complex environmental events?
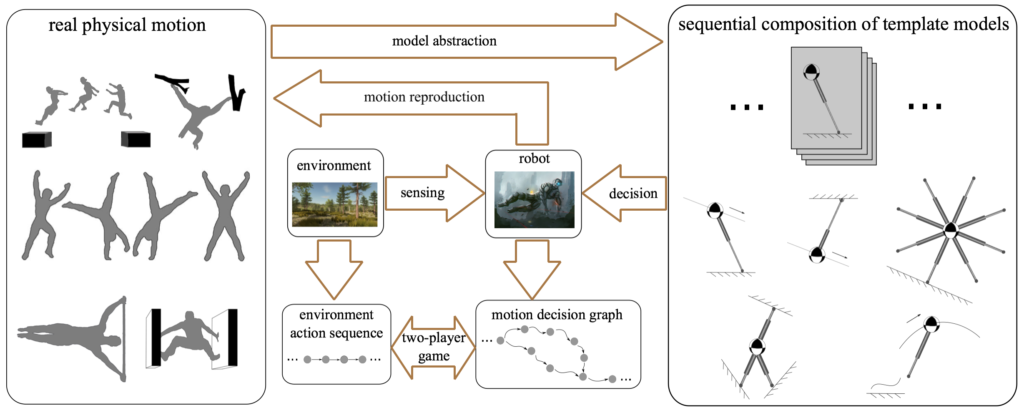
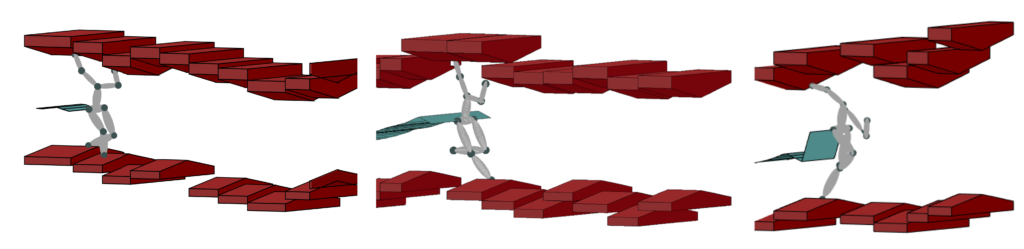
Illustration of template-based locomotion behaviors dynamically interacting with complex environments. Inspired by human and animal motions, our study focuses on how to extract essential locomotion dynamics, make model abstractions via template-based models, and make high-level decisions in response to complex environmental events.
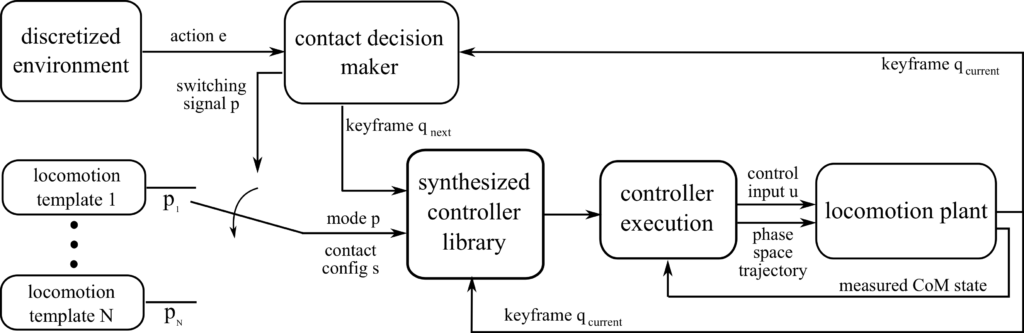
A logic-based locomotion planner structure. A set of locomotion templates is devised for maneuvering in constrained dynamic environments. Each template is indexed by a switching signal. The control actions describe limb contact configurations. Based on an environmental action and a keyframe state at the current walking step, the contact decision maker decides the contact switching signal and the next keyframe locomotion state.
Application of the proposed whole-body dynamic locomotion methodology: The US Defense Advanced Research Projects Agency (DARPA) initiated a Subterranean Challenge in 2018 aiming at augmenting underground operation capabilities. “The Challenge aims to explore new approaches to rapidly map, navigate, and search underground environments … and propose novel methods for tackling time-critical scenarios through unknown courses in mapping subsurface networks and unpredictable conditions, which are too hazardous for human first responders”. Our proposed hierarchical decision-making approach for whole-body dynamic locomotion in constrained environments raise the importance of decision-making algorithms with formal guarantees for robots as complex as humanoid robots, a research topic of increasing importance as these robots begin to move out of the laboratories and work outdoors.
Representative publications:
Y. Zhao, Y. Li, L. Sentis, U. Topcu, and J. Liu. Reactive Task and Motion Planning for Robust Whole-Body Dynamic Locomotion in Constrained Environments. International Journal of Robotics Research, Conditionally Accepted, 2020. [Preprint] [Video]
Ye Zhao, Ufuk Topcu, Luis Sentis. High-level planner synthesis for whole-body locomotion in unstructured environments. 2016 IEEE 55th Conference on Decision and Control (CDC), pages 6557-6564, 2016. [BibTeX][PDF][Video][Supplementary Material]